从零开始 AUTOSAR 软件架构
在 AUTOSAR 架构中可以分为两个不同分支,分别是 CP 和 AP,CP 表示 Classic Platform 经典平台,AP 代表 Adaptive Platform 自适应平台。从名称上来看,AP 平台更加高大上,CP 听起来老旧。没错,从字面上,AP 更加现代,面向于高性能平台,更符合现代的车联网以及自动驾驶领域使用。而 CP 平台适用于传统的嵌入式系统,特别是对实时性要求高的场景。
由于笔者多年来一直在做实时应用,所以对 AP 平台是一窍不通;对 CP 平台算是稍微了解一些。本系列的后续工作都将围绕 CP 平台进行展开。
经典平台的 AUTOSAR 架构
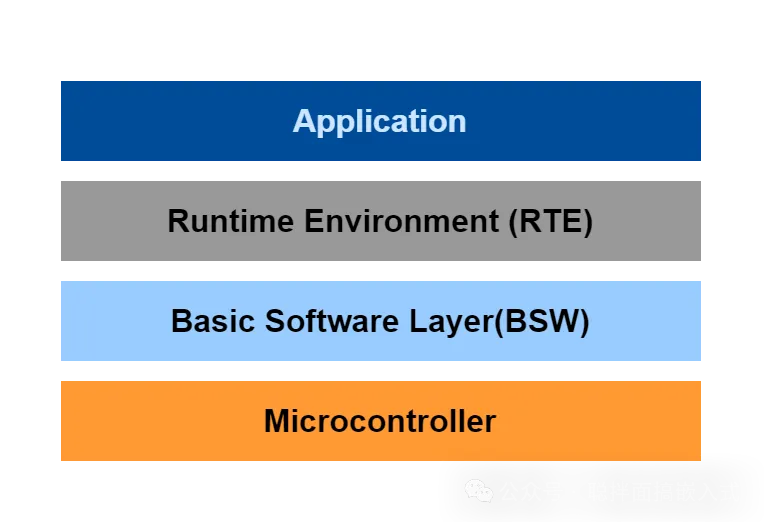
AUTOSAR 架构是一种分层的软件架构,宏观上由三层组成:
- 应用层
- 运行环境层(Runtime Environment)
- 基础软件(Basic Software)
在了解每层的划分含义之前,先区分两个特有名词:
- SWC(Software Component)软件组件
- BSW(Basic Software)基础软件
所有的设计出来具有独立功能的软件都可称为软件组件,在 C 语言中,可以理解为一个个的 .c 文件都是软件组件。基础软件是所有底层和通用组件的集合。
运行环境层
RTE 是 AUTOSAR 中的中间层,它提供了一个接口并实现了基础软件(BSW)与应用层之间的通信。RTE 将应用层与 BSW 分离,并支持 ECU 间(不理解可以跳过)和 ECU 内部的通信。RTE 基于虚拟总线通信(VFB),该机制连接了所有这些组件(SWC、BSW),并使它们能够进行通信。
基础软件层
BSW 基础软件在 AUTOSAR 架构下分为三个部分:
- 服务层
- 抽象层,也称ECU抽象层
- 微控制器抽象层(具体硬件驱动)
应用软件
应用层位于最上层,包含了称为软件组件(Software Component, SWC)的应用软件。在这个层次上,SWC并不知道用于交换数据的具体硬件以及通信协议或接口。这意味着应用软件的开发是完全独立于硬件的,它只专注于最终输出(例如速度、时间或任何计算结果)和数据处理逻辑。
通信中关于 PDU 的内容
PCI、PDU 和 SDU
在实际动手之前,先了解几个名词缩写,这对于开发通信部分组件很有必要,在 AUTOSAR 思想中,通信数据在不同层次组件之前遵循 PDU 和 SDU 的转换:
- PDU:Protocol Data Unit,协议数据单元,为一种特定协议格式的数据
- SDU:Service Data Unit,服务数据单元,为协议中携带的数据信息
- PCI(Protocol Control Information)控制协议信息,一般用于多帧消息的传输控制,当然也可以自定义 PCI 来实现自定义的功能。
- MetaData:元数据,广义上讲,元数据指描述数据的数据,可以是通俗的明文描述,例如字符,也可以是普通数据。
由顶层到底层,由上而下,当前层级的 PDU 为下一层级的 SDU,当前层级的 SDU 为上一层级的PDU;如何理解?
- 在应用架构中,越靠近面向用户或者业务逻辑的层级一般为上层;对应的,下层更靠近机器或者设备硬件。
- 当前的 PDU 属于下层 SDU 的一部分,同时携带了上层需要的 SDU。
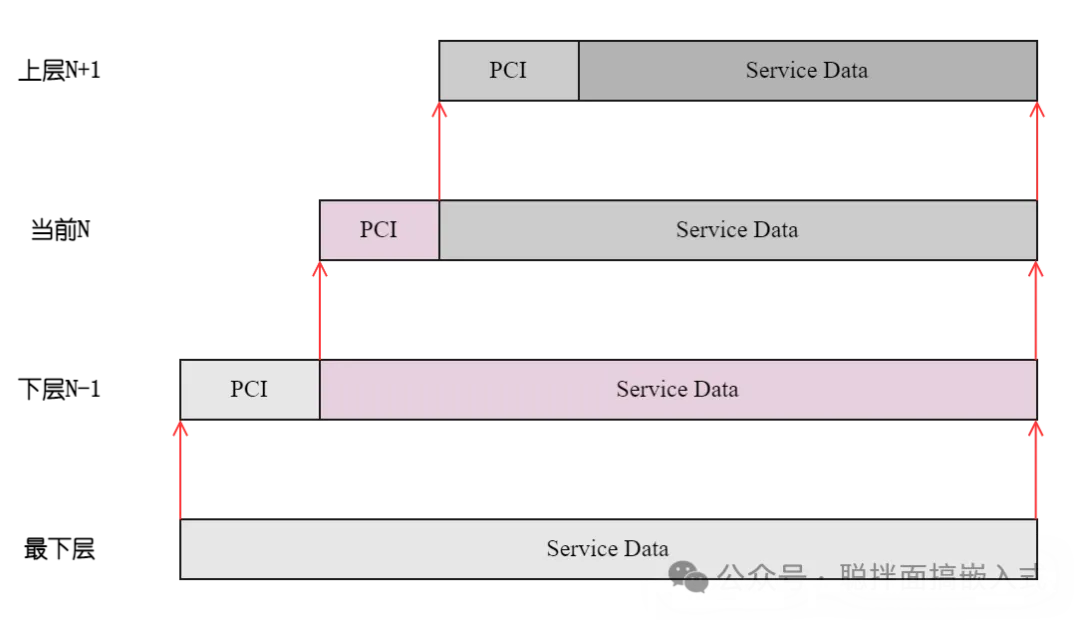
在图中,PCI 是协议控制信息,当然,有时候上下层是直接透传的,这时可以不需要 PCI,PCI 是上层不太关心的数据。
为什么要做 PDU 和 SDU 区分?如果一句话概括,就是解包和封包,我给别人发快递,包装发货;别人取东西,手撕快递。数据也是一样的逻辑。
例如从硬件端发出的数据都是原始的数据,我们称为 Raw Data,将 Raw Data 传递给上游时,上游是要区分是从哪个硬件端接收到的数据。我们可以给不同的硬件标记唯一 ID,然后在数据中携带 ID 信息传递给上游,这里被一起打包的数据就形成了 SDU。当然除了唯一 ID 外,甚至可以一起打包设备名称、制造日期等信息一起向上传递。ID 和设备信息等可以看成 PCI 数据或者 Meta Data。
上游拿到的打包数据之后,对于上游应用来说,它其实最重要的就是硬件 ID 和数据,它通过特定的格式协议解包拿到 PCI 和 SDU,设备的唯一 ID 在 PCI 或者 MetaData 中。
I-PDU、L-PDU 和 N-PDU
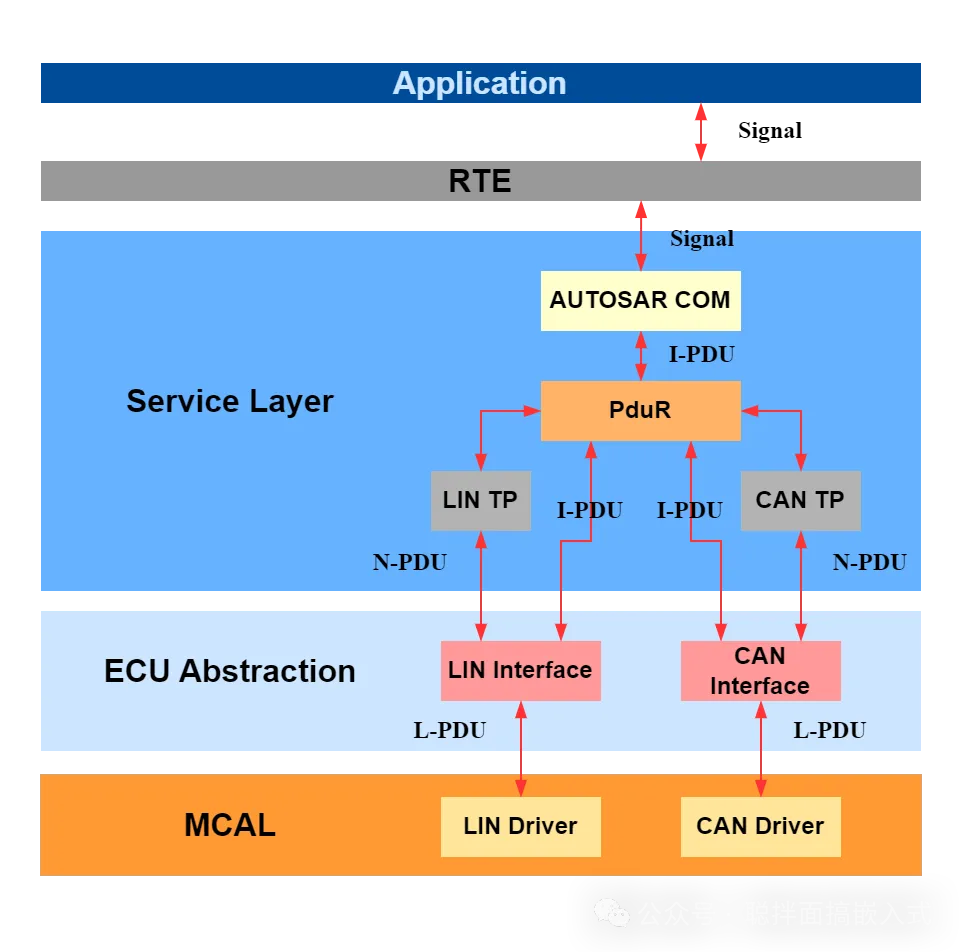
关于这三者的解释,直接看图:
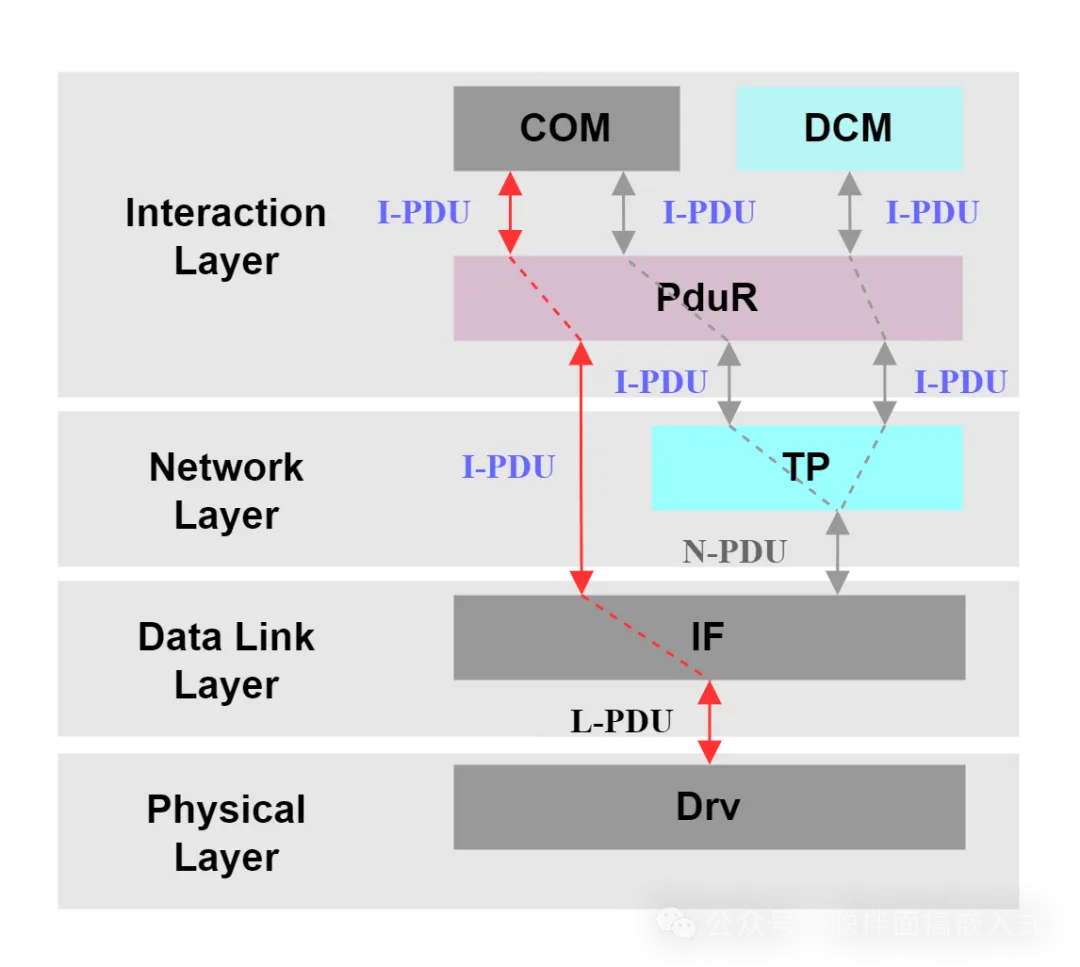
L-PDU 是为数据链层级的 PDU;N-PDU 为网络层级的 PDU;I-PDU 为数据交互层 PDU;上图的下三层是一个经典的三层网络模型结构(学过机组或者 TCP 的会感觉好熟悉);
- 物理层在 CAN 通信可以指 CAN 控制器,收发器,实际的 CAN 线
- 数据链路层,物理寻址,在这层,PCI 控制协议往往决定了实际的物理线路,所以 L-PDU 下发时,物理层驱动会找到对应物理线传输数据。在 CAN 通信中,与物理相关的可能是 CAN 的收发器 ID、发送通道、CANID 等
- 网络层,在上面这个模型中,网络层包含了传输层 TP,严格一点传输层是可以单独分层的;传输层的功能是拆包和打包。例如一大串数据传输时,往往是分批传输,网络层会按照特定协议等所有数据完整后再向上传递;相反的,上层的数据如果过大,网络层也会拆包分批向下传递。网络层的另一个作用是控制路由,例如,长消息需要先给传输层进行打包再传递,所以长消息是路由给TP的,短消息不需要打包,短消息可以直接跳过 TP 向上传递。
如果将上面的网络模型嵌套到 AUTOSAR 软件架构中,就会变成以下:
从零开始切入点的选择
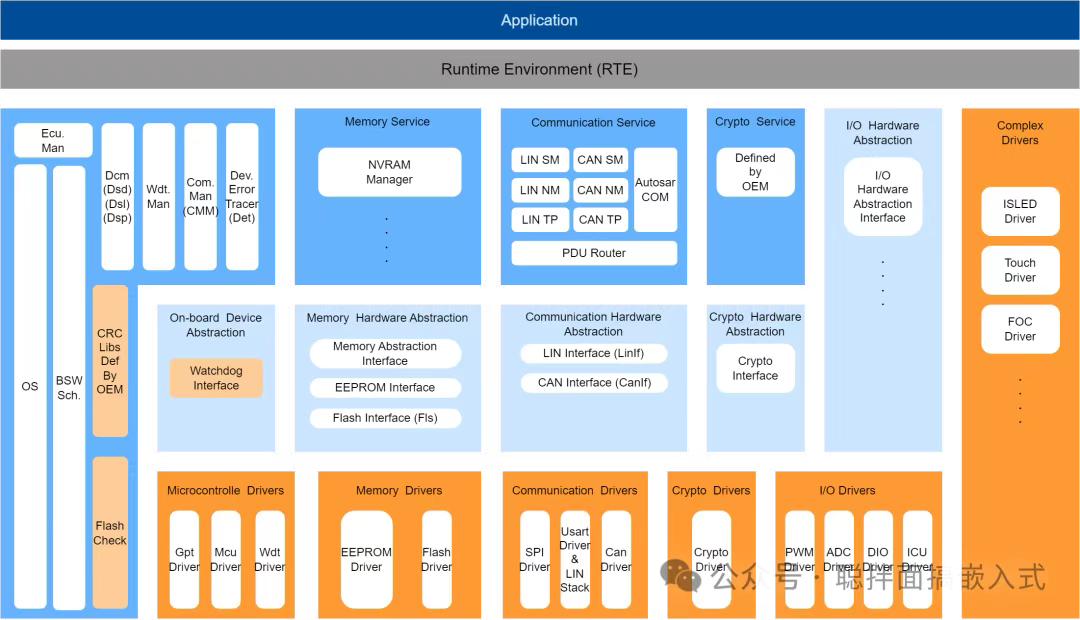
为了降低 AUTOSAR 理解难度,我们从整个架构中拆解出与 CAN 相关的 BSW,并维持其层次结构,开发设计与 CAN 相关的 SWC;
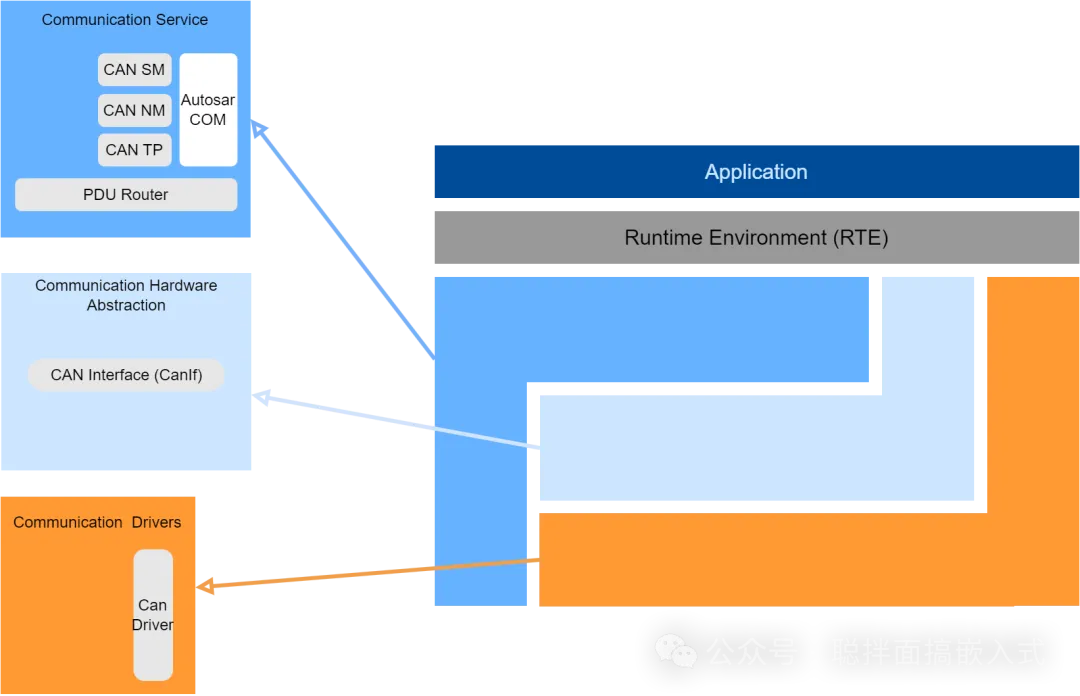
进一步降低准入门槛,NM(Network Manager)网络管理与 SM(State Manager)部分也暂时剔除;在开始之前,先要理解 CAN Driver、CAN Interface、PDU Router、以及 CAN TP、和 AUTOSAR COM 组件之间的关系。
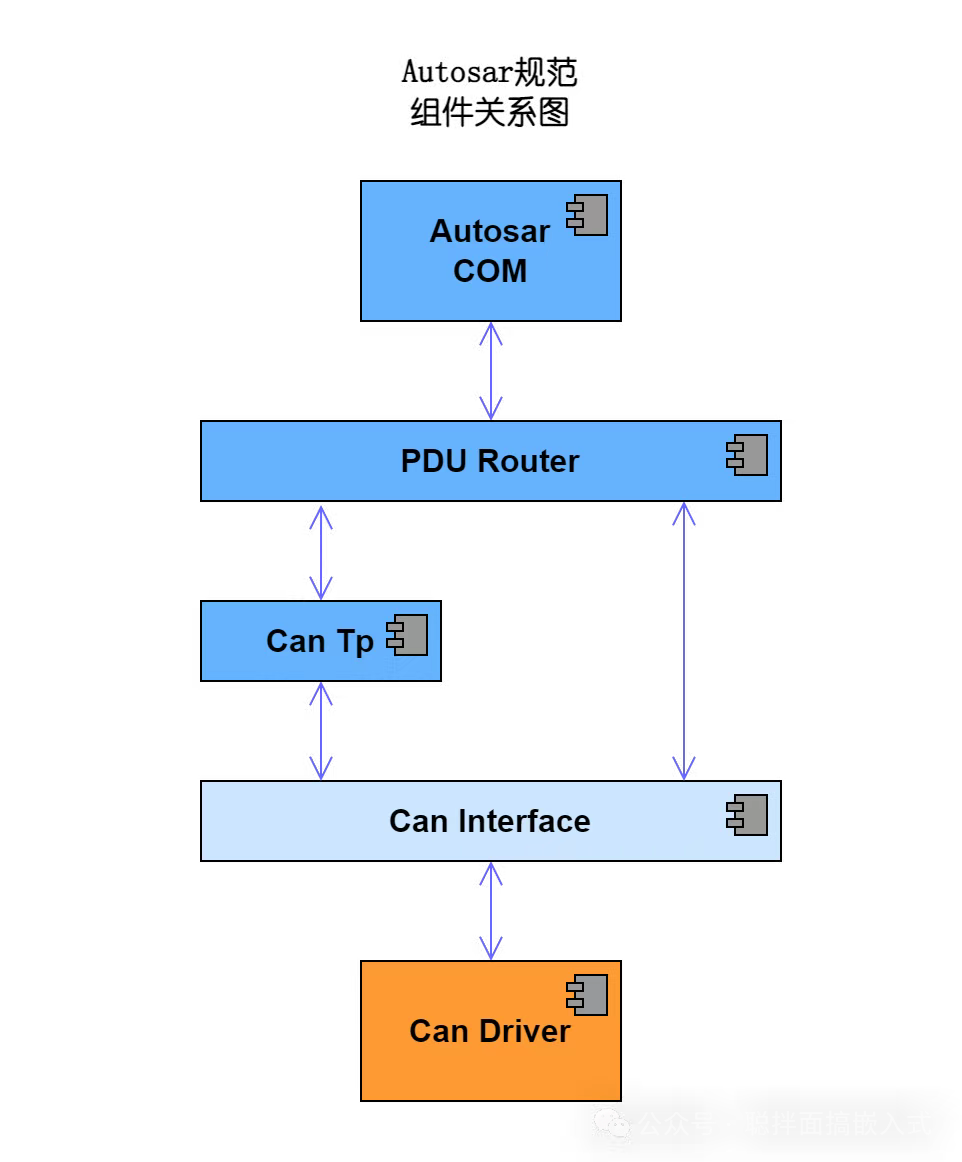
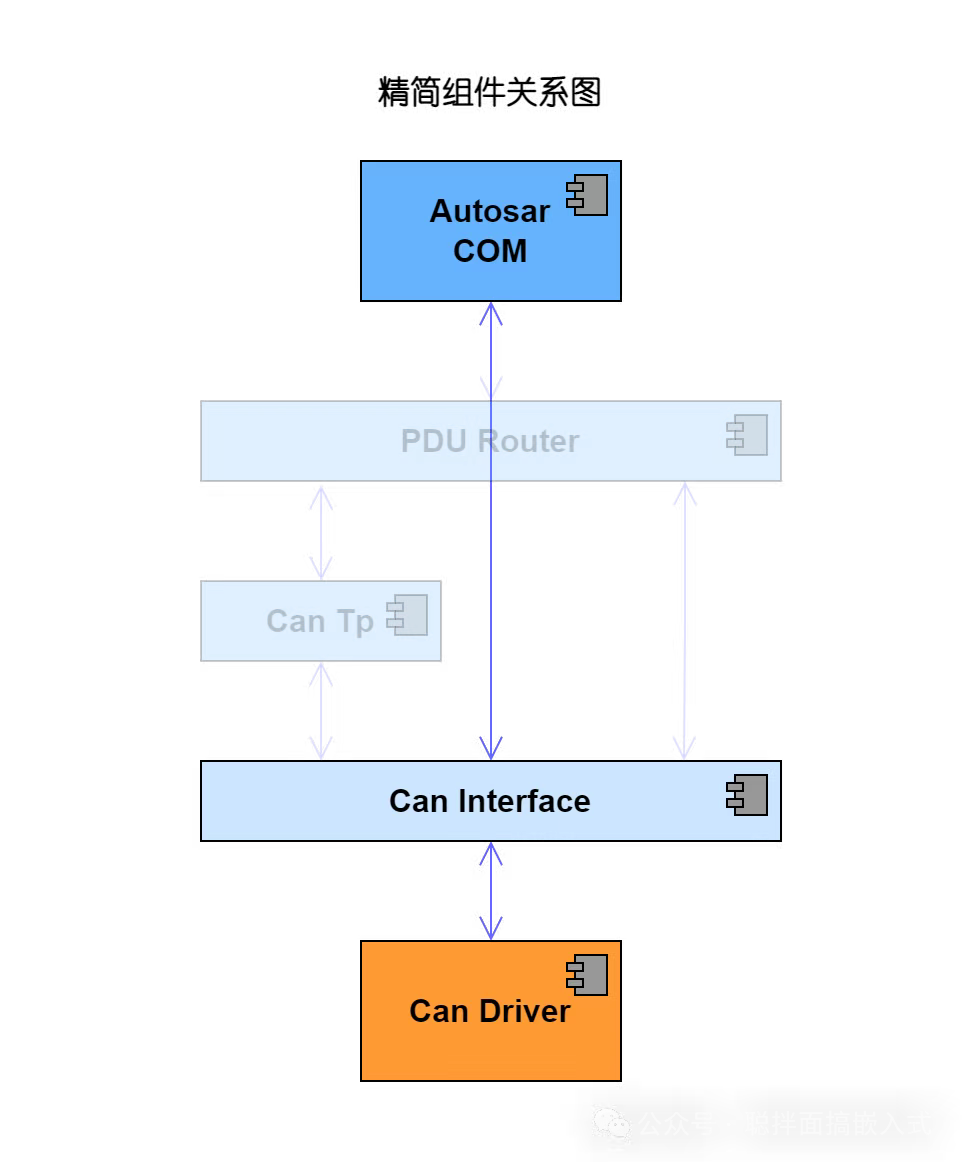
CanIf 作为 CAN 的 ECU 抽象,它是 CAN 驱动与 PDU 路由之间的桥梁,PDU 路由(PduR)的作用是传递分发上下层的 I-PDU,如果考虑总线 ECU 总线数量一,类型单一,在前期可以剔除 PduR 组件。
在系列合集的前面章节,我们优先实现 CanIf 与 Com 组件,并跳过 PduR,直接实现 CanIf 与 Com的直接交互,然后基于 PC 平台仿真和实际的 MCU 硬件实现 Can Driver 并跑通 CAN 通信。
总结
写本合集的目的,主要是想将自己对嵌入式和 AUTOSAR 的软件架构的理解整理,同时也想启发更多的嵌入式同行向架构师迈进。另外,笔者本身也是 AUTOSAR 废柴一个,并没有通读规范,有写的不到位的欢迎指导,并一起交流学习。学习交流请私信我。最后附一张组件全景图。